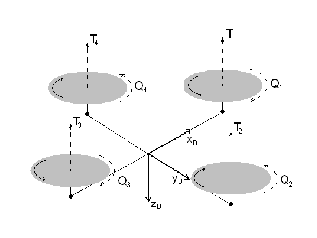
Il quadri-rotore è composto da quattro moduli motore elettrico-rotore a passo fisso disposti alle estremità di due aste disposte in croce. Nella parte centrale del mezzo è posizionata una struttura di supporto per l'avionica. Il velivolo viene controllato inclinando il mezzo e quindi il vettore trazione (in prima approssimazione normale al piano dei rotori) nella direzione desiderata. La trazione sviluppata dal singolo rotore viene controllata variando il numero di giri: in tal modo si realizza sia il controllo della traiettoria, sia quello degli angoli di assetto. La figura mostra uno schema del velivolo con indicato il verso di rotazione (dello stesso segno per i rotori posti sulla stessa asta) dei singoli rotori e il segno della coppia aerodinamica (Qi).
Modello matematico
Nello spazio di stato le equazioni del moto del velivolo sono descritte nella forma seguentein cui
è il vettore delle variabili di stato con (N,E,D) le coordinate del baricentro, (u,v,w) e (p,q,r) le componenti rispettivamente della velocità lineare e angolare, (φ,θ,ψ) gli angoli di assetto, e
è il vettore delle variabili di ingresso dove ogni elemento rappresenta la velocità angolare del rotore i-esimo. Inoltre
dove IB è il tensore di inerzia, LEB è una matrice di trasformazione, gli altri simboli hanno il significato noto e
è il vettore delle forze generalizzate. La forza FB e il momento MB si esprimono come
in cui gli apici R, C, P, G indicano rispettivamente i contributi di rotori, cellula, forza peso e azioni giroscopiche. Le azioni aerodinamiche sviluppate dai rotori sono rappresentate mediante la teoria dell'elemento di pala, utilizzando il modello di disco attuatore per l'espressione della velocità indotta.
Per quanto riguarda il modello dei motori, si usa una dinamica del primo ordine
dove ωm è la velocità angolare del motore, pari a nωm, essendo n il rapporto di trasmissione, Q la coppia del rotore, J il momento polare del sistema rotore-motore, τ e K, rispettivamente, la costante di tempo meccanica e una costante del motore, νa è la tensione di alimentazione, che rappresenta la variabile di controllo del sistema. La tensione è comandata mediante segnali PWM.
Infine, avendo il velivolo ha 4 dinamiche disaccoppiate, per studiare separatamente i moti possiamo definire delgi pseudo-ingressi δA,δE,δR,δT:
![\begin{displaymath}
u=\left[\begin{array}{c}
\delta_T \\ \delta_A \\ \delta_E ...
...} \\ \nu_{a_2} \\ \nu_{a_3} \\ \nu_{a_4}
\end{array}\right]
\end{displaymath}](formulae/img8.png) |
(8) |
Il modello del quadri-rotore è stato validato nella condizione di hovering, verificando che la velocità dei rotori calcolata per il volo sostentato (massa pari a 0.49 kg) corrispondesse a quella misurata sul prototipo (1800 rpm).
Sistema di controllo
E' stato progettato uno SCAS (Stability Control Augmentation System) con le classiche funzionalità di aumento di stabilità e di controllo per realizzare, per i tre canali di assetto, un modo di comando ACAH (attitude command, attitude hold) su beccheggio e rollio e un modo RCAH (rate command, attitude hold) per l'imbardata. La velocità verticale è la quarta variabile controllata.
I controllori sono sintetizzati separatamente sfruttando il disaccoppiamento delle dinamiche pertinenti nella condizione di riferimento di hovering.
L'approccio alla sintesi è di tipo classico, e fa riferimento al metodo del loop-shaping, dove le specifiche sul modulo della funzione di anello L si definiscono mediante una regione ammissibile sul diagramma di Bode.
Per le basse frequenze la pendenza della retta limite (al di sopra della quale deve passare la funzione di anello del processo controllato) è pari a -20 db/dec per avere un sistema di tipo 1.
La frequenza di taglio sarà specificata caso per caso per le dinamiche considerate. Alle alte frequenze (ω>194 rad/s, corrispondente alla velocità angolare dei rotori nella condizione di riferimento) si richiede che il modulo di L sia inferiore a -20 db per attenuare il rumore di misura di un fattore 0.1.
Per limitare i problemi di implementazione, nel modello di sintesi per ciascuno dei quattro controllori, due uguali per la risposta su beccheggio e rollio con struttura multi-loop, e due (con la stessa struttura single-loop) per l'imbardata e la velocità verticale, sono compresi gli effetti di:
- ritardo nella dinamica del sensore (Tsens=6.84ms)
- ritardo computazionale del controllore on-board che opera a 100 Hz (Ts=0.01s)
- ritardo associato al campionamento (la metà del periodo di campionamento Tc)
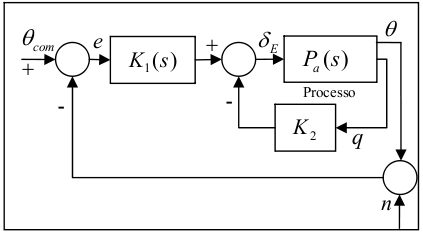
Schema della logica di controllo multi-loop per la dinamica longitudinale
Il comportamento del sistema a catena chiusa con i quattro controllori discretizzati con il metodo di Tusting con passo T =0.01 è stato analizzato in simulazione non lineare in ambiente Matlab/Simulink.
Riepilogo controllori