Per la struttura, i motori ed i rotori del modello è stato utilizzato un DraganFlyer V Ti, della Dragan Fly Innovation Inc., che commercializza un prodotto della Spectrolutions Inc. (è possibile trovare documentazione sul DF V qui).
Una volta rimosse le componenti elettroniche, il carico pagante del DF V è di circa 250g per mantenere l'autonomia approsimativa di 15'. L'analisi del compromesso tra funzionalità, espandibilità, peso / dimensioni e potenza computazionale ha portato alla scelta di mini-computer Gumstix con la configurazione in figura.
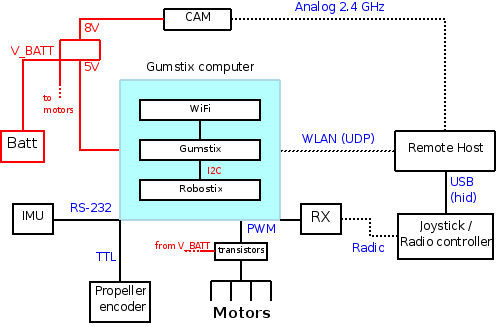
La scheda Gumstix ospita un microprocessore Marvell PXA255 (400MHz,16MB ram) per le comunicazioni a terra via UDP e/o ssh e per le operazioni di alto livello. La scheda Robostix ospita un microcontrollore ATMega128 programmabile in C, sul quale è installato il codice del controllore modellato con Matlab/Simulink e autogenerato con RealTime Workshop Embedded Coder. Il microcontrollore garantisce inoltre l'hard real-time (attualmente a una frequenza di 50Hz), gestice la comunicazione seriale con il sensore inerziale, sincronizza i dati ricevuti, modula il segnale PWM per i motori e implementa le procedure per le situazioni di emergenza.
La guida del velivolo avviene attraverso un radiocomando da eli-modellismo; in questo momento utilizziamo un Futaba 6-EXH ma un qualsiasi radiocomando con almeno 4 canali può andare ugualmente bene. Il link principale prevede la connessione del radiocomando al pc tramite la porta tutor della trasmittente e l'adattatore USB; il segnale è quindi inviato tramite WiFi 802.11bg al computer di bordo. Il link di backup utilizza direttamente il segnale radio del radiocomandoi (35,40 o 72MHz, vedi la tavola delle frequenze permesse nel tuo paese), il quale viene ricevuto dalla ricevente dedicata a bordo e trasmesso direttamente al microcontrollore sulla Robostix.
I sensori a bordo del velivolo sono:
- l'unità inerziale (IMU) è un Xsens MTx con una frequenza di campionamento di 50Hz, per la misurazione di angoli di assetto, velocità rotazionali e accelerazioni lineari.
- per monitorare la velocità dei rotori sono stati utilizzati sensori ad effetto hall, latched per ottimizzare il tempo di lettura, abbinati a una coppia di magneti solidali con il rotore
- una videocamera wireless che, in questa prima fase del progetto, comunica con un canale separato alla stazione di terra
A bordo sono inoltre presenti:
- una scheda per la gestione della potenza dei motori, con un transistor MOSFET per motore, i quali sono comandati in PWM
- una batteria ai polimeri di litio da 1150mA, 11.1V
- un adattatore di tenzione a 5V (per il computer di bordo)
- mini-ricevente radio
La massa complessiva delle componenti avioniche è 250g, e la massa totale del velivolo 500g.
Riepilogo componenti: