The vehicle structure, motors and rotors are taken from DraganFlyer V Ti, by Dragan Fly Innovation Inc.; the model is developed by Spectrolutions Inc. (you can find some documentation about DF V here)
After removing electronics parts, payload of DF V is about 250g to keep the autonomy of 15'. The compromise between features, expandability, weight/dimension rate and computational power lead us to use mini-computer Gumstix with the configuration below.
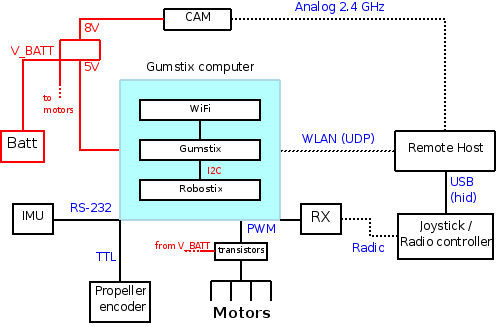
Gumstix board host a Marvell PXA255 microprocessor (400MHz, 16MB ram) for ground communications via UDP and/or ssh login, and for high level operations. Robostix board mount a ATMega128 micro-controller, C programmable; on the micro-controller is installed the controller code developed with Matlab/Simulink and auto-generated with RealTime Workshop Embedded Coder. Additional C code assures hard real-time (@50Hz), manages serial communication with IMU (inertial measurement unit), sync data, generates PWM signal and implements procedure for emergency situations.
The vehicle can be driven with an hobby radio transmitter; now we're using an Futaba 6-EXH but any other rc tx with at least 4 channel and tutor port can be used as well. Main link is implemented connecting the radio to pc using the tutor port on radio and a USB adapter on the PC side; next, commands are sent via WiFi 802.11bg to airborne computer. Backup link use directly the radio signal at radio transmitter frequency (35/50/72 MHz, see the allowed frequency table for your country), that is received by a dedicated mini-receiver on board and then sent to the Robostix.
Sensor on board are:
- Inertial Measurement Unit (IMU): Xsens MTx with a sample freq of 50Hz
- Rotor encoder: Hall Effect sensors, latched for optimal reading
- wireless camera on a dedicated 2.4GHz link
Other element on board:
- motor power board, with a MOSFET per rotor, driven by a PWM signal
- PoLi battery for hobbyist, 1150mA, 11.1V
- 5V switcher
- mini-radio receiver
Overall mass of avionics components is 250g, overall vehicle mass is 500g.
Components summary: